|
Camargue
|
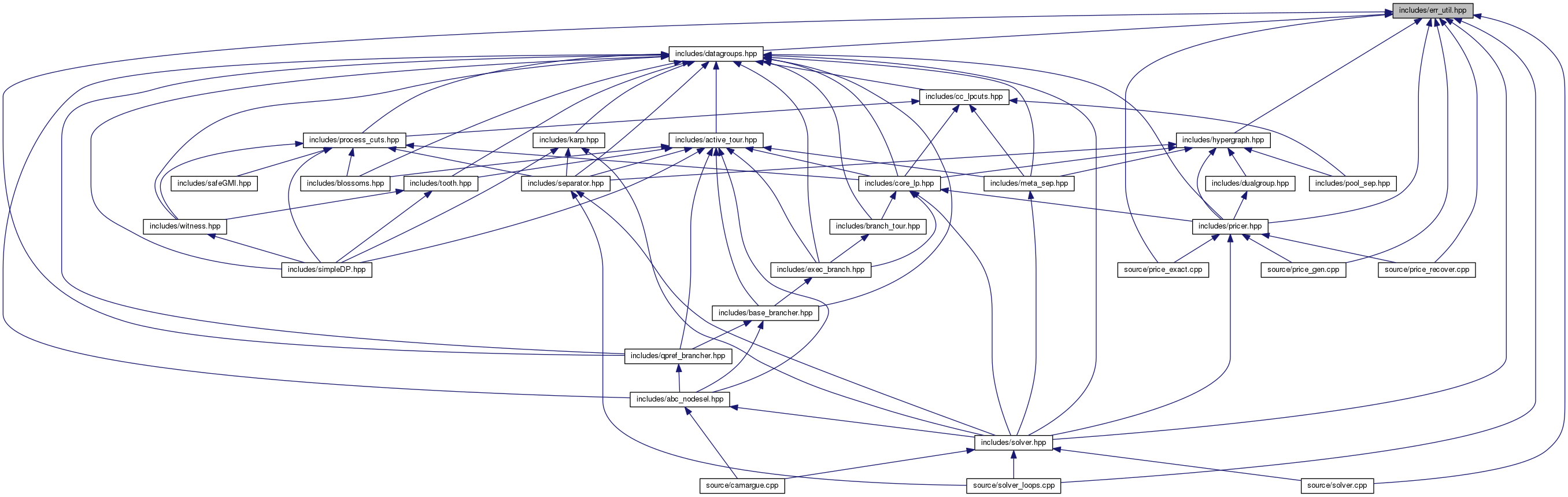
ERROR HANDLING CLASSES AND ROUTINES. More...
#include <stdexcept>#include <string>#include <iostream>
Go to the source code of this file.
Classes | |
| class | CMR::util::ScopeGuard< act_type > |
| Code from Andrei Alexandrescu's ScopeGuard11 slides. More... | |
| struct | CMR::util::retcode_error |
| Structure for converting retcodes to exceptions. More... | |
Namespaces | |
| CMR | |
| The namespace for this project. | |
| CMR::util | |
| Utility functions/structures used miscellaneous places in the project. | |
Macros | |
| #define | CMR_CATCH_PRINT_THROW(msg, new_ex) |
| Macro for handling errors in function with multiple failure points. More... | |
Functions | |
| template<typename act_type > | |
| ScopeGuard< act_type > | CMR::util::make_guard (act_type f) |
| Type deduction function for ScopeGuard, also from Andrei Alexandrescu. More... | |
ERROR HANDLING CLASSES AND ROUTINES.
This file contains classes for creating cleanup objects and exceptions derived from standard library runtime error.
| #define CMR_CATCH_PRINT_THROW | ( | msg, | |
| new_ex | |||
| ) |
Macro for handling errors in function with multiple failure points.
Suggested usage: This macro should be used in a function by initially declaring a runtime_error new_ex("Function failed."). Then, for various smaller tasks within the function that may throw for distinct reasons (and which throw exceptions derived from std::exception), use a try block followed by CMR_CATCH_PRINT_THROW("description of failure in small task", new_ex).
 1.8.11
1.8.11

