|
Camargue
|
Class template for branching with priority queue via some preference rule. More...
#include <qpref_brancher.hpp>
Public Member Functions | |
| QprefBrancher (const Data::Instance &inst, const Data::BestGroup &best_data, const Graph::CoreGraph &core_graph, LP::CoreLP &core_lp) | |
| BranchHistory::iterator | next_prob () |
| Return the next subproblem to be examined. | |
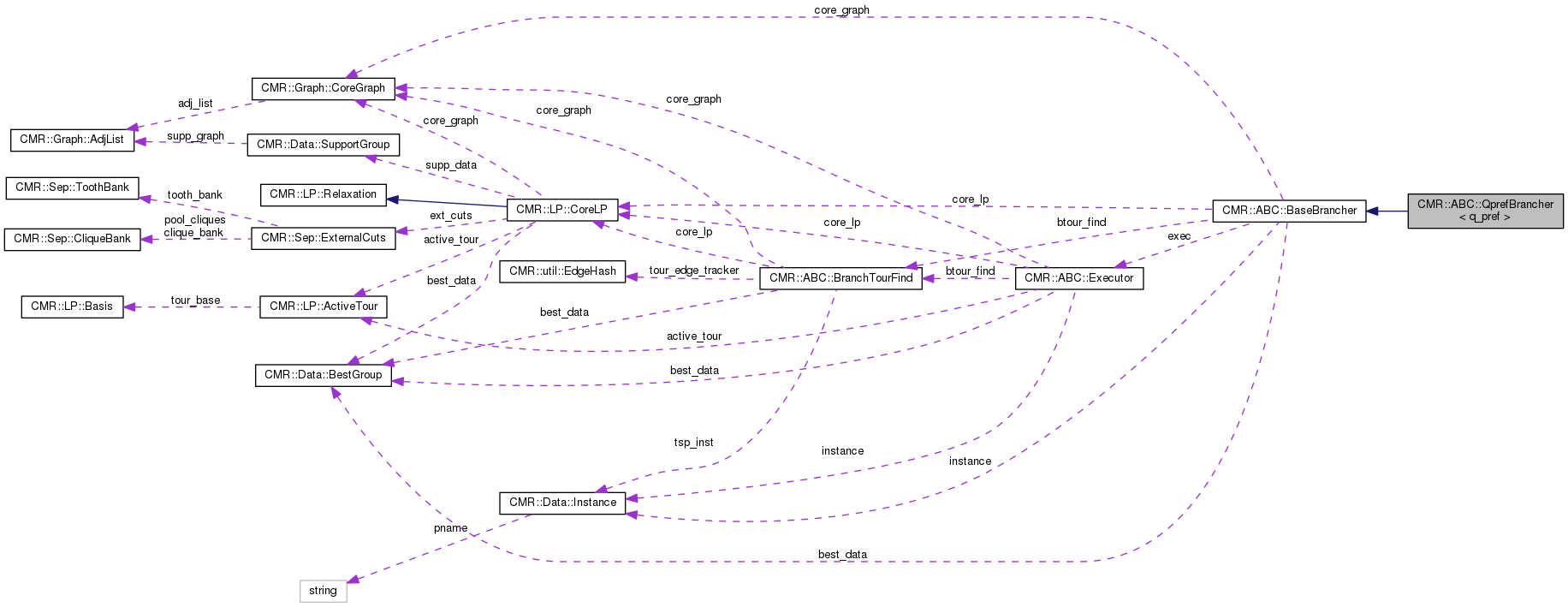
 Public Member Functions inherited from CMR::ABC::BaseBrancher Public Member Functions inherited from CMR::ABC::BaseBrancher | |
| BaseBrancher (const Data::Instance &inst, const Data::BestGroup &bestdata, const Graph::CoreGraph &coregraph, LP::CoreLP &core) | |
| void | split_prob (BranchHistory::iterator ¤t) |
| Split the current problem, adding the subproblems to branch_history. | |
| void | do_branch (const BranchNode &B) |
Branch on B, enforcing its constraint and instating its tour. | |
| void | do_unbranch (const BranchNode &B) |
Unbranch on B and all applicable ancestors to prep next problem. | |
| const BranchHistory & | get_history () |
Protected Member Functions | |
| void | fetch_next () |
| Set next_itr to the next subproblem to be examined. More... | |
| void | enqueue_split (BranchNode::Split prob_array) |
| Adding child subproblems to branch_history. More... | |
| Protected Member Functions inherited from CMR::ABC::BaseBrancher | |
| void | common_prep_next (const BranchNode &done, const BranchNode &next) |
Execute variable changes if done was just done and next is next. More... | |
| bool | prune_btour_edges (const BranchNode &done, const BranchNode &next, const BranchNode &common_anc) |
| Should branch tour edges be pruned before going to the next problem. More... | |
Private Attributes | |
| std::priority_queue< BranchHistory::iterator, std::vector< BranchHistory::iterator >, BranchNode::Pref > | prob_q |
Additional Inherited Members | |
| Public Attributes inherited from CMR::ABC::BaseBrancher | |
| int | verbose = 0 |
| Protected Attributes inherited from CMR::ABC::BaseBrancher | |
| const Data::Instance & | instance |
| const Data::BestGroup & | best_data |
| const Graph::CoreGraph & | core_graph |
| LP::CoreLP & | core_lp |
| BranchTourFind | btour_find |
| Executor | exec |
| BranchHistory | branch_history |
| BranchHistory::iterator | next_itr |
Class template for branching with priority queue via some preference rule.
| q_pref | the ranking function used to instantiate branching relative to a specific node selection criterion. |
|
protectedvirtual |
Adding child subproblems to branch_history.
| prob_array | the pair of child subproblems to be added. This function shall be implemented to add child subproblems to the list of problems to be processed in a way that preserves the ordering criteria of the node selection rule. |
Implements CMR::ABC::BaseBrancher.
|
protectedvirtual |
Set next_itr to the next subproblem to be examined.
This is effectively the implementation of the node selection rule.
Implements CMR::ABC::BaseBrancher.
 1.8.11
1.8.11

